PAP-SO Infrastructure, Sampling and Technology
Click on an instrument to find out more
Routine measurements and observations
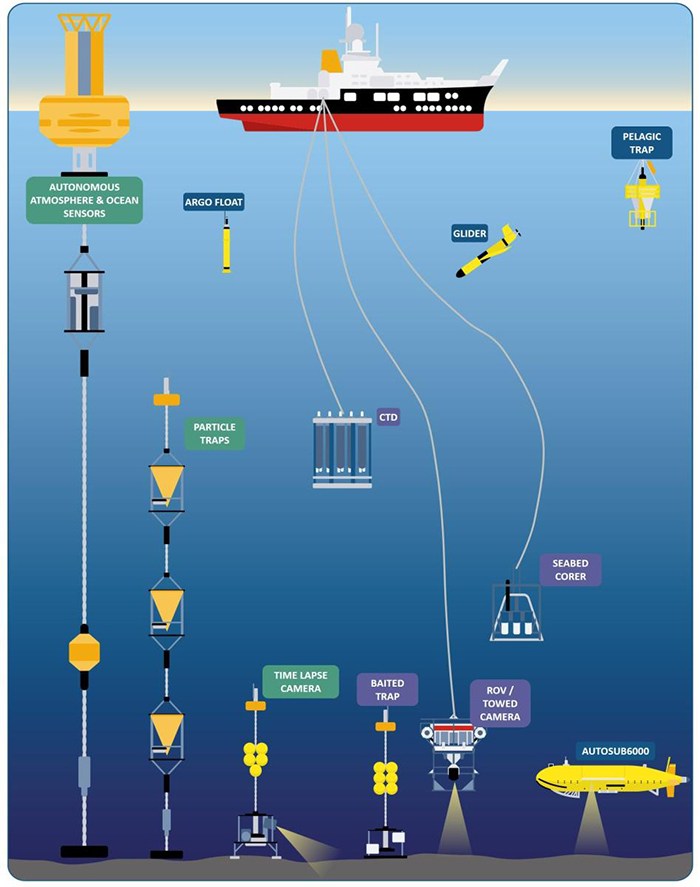
Surface mooring and sensor frame
The Met office buoy stays out all year, attached to the seabed at 4,850m. The meteorological and biogeochemical measurements made from samplers and sensors on the buoy, and on the frame suspended below it, send data ashore in near real time. We can track variations in weather, carbon dioxide, phytoplankton blooms and nutrients – on time scales from minutes, to seasonal and between the years.
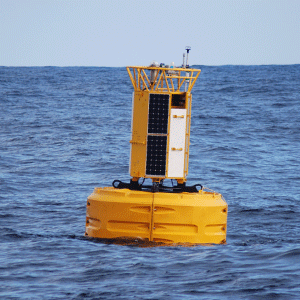
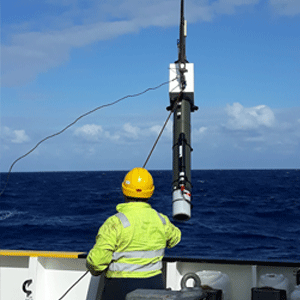
Conductivity, Temperature and Depth (CTD)
The CTD frame supports sensors to measure conductivity temperature and depth (CTD) along with other sensors to measure the chlorophyll, nutrients, light and oxygen in the water column. The frame is lowered over the side of the ship and the bottles are ‘fired’ at depths of interest to collect water. These samples can be analysed onboard, and ashore, to ground truth the sensor data as well as to measure things that can not be measured by sensors.

Particle traps
Particle or sediment traps are funnel-shaped devices that capture sinking particles, concentrating them in bottles of preservative at the base. The bottles rotate to create a sequence of samples over time. The traps are deployed at the PAP-SO for a year collecting samples autonomously and then recovered on the next research cruise. In the labs at NOC the samples are analysed to generate measurements of carbon flux in the Northeast Atlantic. We use traps moored at several depths to provide information at different points in the water column and have been collecting sediment trap samples at PAP-SO since 1991.
![]()
Baited trap
In addition to the rain of plant plankton that falls to the seafloor, food also arrives in the form of the carcasses of dead animals. That material is quickly found and consumed by a range of deep-sea scavengers. Amphipod crustaceans (similar to the familiar sandhopper) are the key scavenging group and are sampled using baited traps that are deployed on the seafloor for 24–48 hours. At the PAP-SO we often catch some ‘giant’ species, up to 10cm long.
![]()
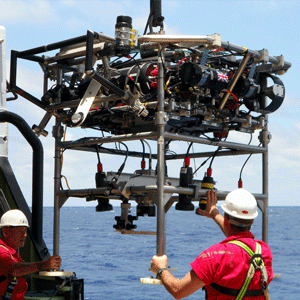
Seafloor photography
Photography from underwater vehicles is used to assess the abundance and diversity of the larger animals that live on the seabed at the PAP-SO. Different systems have been used to collect these images including HyBIS, a robotic underwater vehicle equipped with video and still cameras, and Autosub, an autonomous underwater vehicle (AUV). HyBIS is lowered on a cable giving a real-time camera feed to screens in the on-board lab. Autosub is launched from the ship and carries out a longer missions automatically, enabling the ship to carry out other tasks while the sub works.
![]()
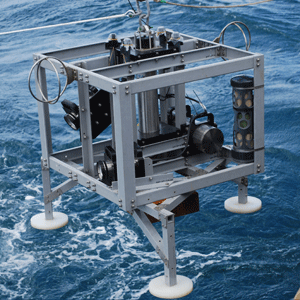
Seafloor time-lapse photography
Bathysnap is a seafloor time-lapse camera system used to observe the seabed over an extended period. The camera sinks to the seabed, where it will remain for periods up to 12 months. It collects images of the seabed from a single location at pre-programmed time intervals. The data generated from these images offer insights into the processes that occur at the seabed over time. The images also reveal the day-to-day behaviour and interactions of rarely seen deep-sea animals.
![]()
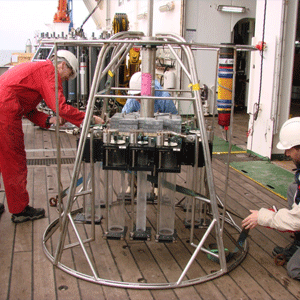
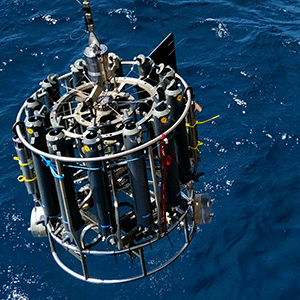
Seabed coring
Samples of seafloor sediment are used for a variety of purposes, how much food is present, what animals live there? These sediment samples are collected using a variety of devices, at the PAP-SO we most often use a Megacore. It enables the collection of up to 12 cores, 10cm in diameter and 40cm in length, in near pristine, undisturbed condition.
![]() Find out more about seabed coring
Find out more about seabed coring

Scientific trawl
To collect and study the largest seafloor animals of the PAP-SO area a trawl is used. Known as an otter trawl, where the mouth of the net is held open by underwater kites (otter boards), the ship must wind out 13,000 (eight miles) of wire rope to fish at abyssal depths. With all that wire to wind back in again, it can take 12 hours to collect one trawl sample.
![]() Find out more about scientific trawl
Find out more about scientific trawl
Autonomous vehicles
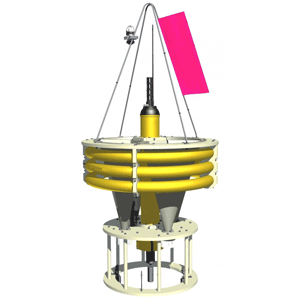
Pelagra profiling sediment trap
“Particle Export measurement using a LAGRAngian trap”. These are traps that drift with zero velocity relative to the water around them. They can be deployed for hours or weeks at multiple depths. Samples are preserved and processed similarly to the McLane sediment traps.
![]()
Argo / BioArgo profiling floats
Argo is an international fleet of robotic instruments that drift with the ocean currents and move up and down between the surface and a mid-water level.

Underwater gliders
Gliders are robotic underwater vehicles that measure oceanographic parameters such as chlorophyll levels, temperature and salinity, and transmit the data back to the shore. They are often used at PAP-SO during process studies that take place at the site but do not currently form part of the routine observations.
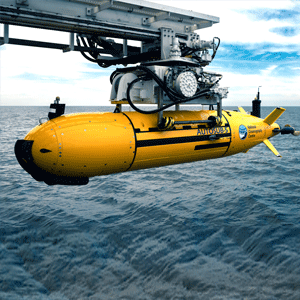
Autosub6000
Autonomous Underwater Vehicles (AUVs) are robot submarines, used to explore the world’s oceans without a pilot or any tether. They are programmed with instructions of where to go, what to measure and what depths to go, before surfacing, hours or days later when they communicate their data via satellite communications.