Sampling at sea gives you many hurdles to overcome, and I am not just talking about seasickness! When we have a CTD rosette in the water it can be travelling through the water column for a few hours.
The maximum rate of cable out is ~60 metres per minute, therefore in 6,000m depth this takes a minimum of 100 minutes to the seabed and back, so that is a minimum total of 3 hours 20 minutes!! When in the ocean the ship is subject to significant influences from wave swell and local weather patterns. As you can imagine the ship’s positioning and speed relative to the ground needs to remain minimal, for this we use Dynamic Positioning. Dynamic Positioning uses the ship’s propellers and thrusters to maintain the its location on station (often within < 4m × 4m!) while the CTD is in the water.
As well as moving horizontally, the ship is subject to moving vertically (heaving and rolling). The heave of the ship adds another dimension to the motion the CTD experiences as it travels through the water. When the CTD is moving up through the water column reaching desired sampling depths, the rosette is ‘parked’ before samples are taken, this settles the wake caused by the movement. In times of significant ship heave and roll, the turbulence and wake caused by the rosette cannot be minimised at these parking depths and has significantly affected data streams in the past.
To reduce these heave motion effects on the CTD, the RRS James Cook (and the RRS Discovery) have Active Heave Compensators (AHC) installed. An AHC works by continuously predicting the ship’s heave, pitch (forwards and backwards tilt) and roll using a motion reference unit in the x-, y- and z-coordinates. This decouples the motion of the ship with the motion felt by the CTD. The algorithm to code these predictions, uses data collected from the ship’s surf and meteorological sensors to predict wave motion approximately 10 seconds into the future and 50m away from the point of measurement! This predictive algorithm control minimises the delay due to inertia in the winch system and minimises the chance of too much cable being paid out.
Even though this method of heave prediction was first coined in 2011, putting this into practice in the real world needs rigorous trails and comes with multiple setbacks. Heave compensators have been on both the RRS James Cook and RRS Discovery for a few years now, however there has been hesitancy and small trust in the reliance of the AHC providing results without potential failings or causing significant delays in productivity. When your CTD rosette totals up to over £200,000 you have to be trusting the technology you use with it! The loss or damage of any element on the CTD rosette would be detrimental to the research and productivity on board a research cruise. After years of trials, with individuals have been perfecting the code, assessing the AHC reliability and proving it has successful application on board our research vessels, JC191 are trusting the testing and braving the application of the AHC.
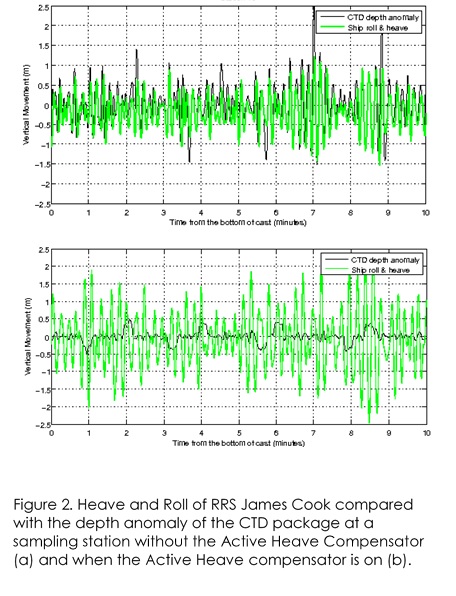
Our Principal Scientist, Dr Alejandra Sanchez-Franks, does it again in proving she has a natural flare for this role, she was right to give the AHC a go! We have been seeing a huge reduction in the depth anomaly of the CTD rosette when compared with the heave and roll of the ship. I have depicted this change using Figure 2, showing two different stations, one without the AHC (a) and another with it (b). The change in depth of the CTD rosette (black) around a nominal depth throughout the water column moves through the range of ±0.5m when the AHC is on (Figure 2b). When the CTD movement is coupled with the motion of the ship (green), the depth anomaly reaches ±2.5m. This is hugely significant, and the change has caused quite a bit of excitement on board.
Thihs is particularly exciting for the scientists on board, knowing that we have an additional accuracy and reliance in the data we are producing as part of the Global Ocean Ship-Based Hydrographic Investigations Program. When carrying out our preliminary data quality control, we are seeing profiles that give much smoother patterns than have been previously observed, when the heave compensator has not been active. This lends us to quite an exciting time as we are all working hard to produce the highest quality of oceanographic and climate data which will be used by scientists all over the world and by future generations of Oceanographers that will follow us!